قانون محيط المثلث متساوي الساقين موضوع
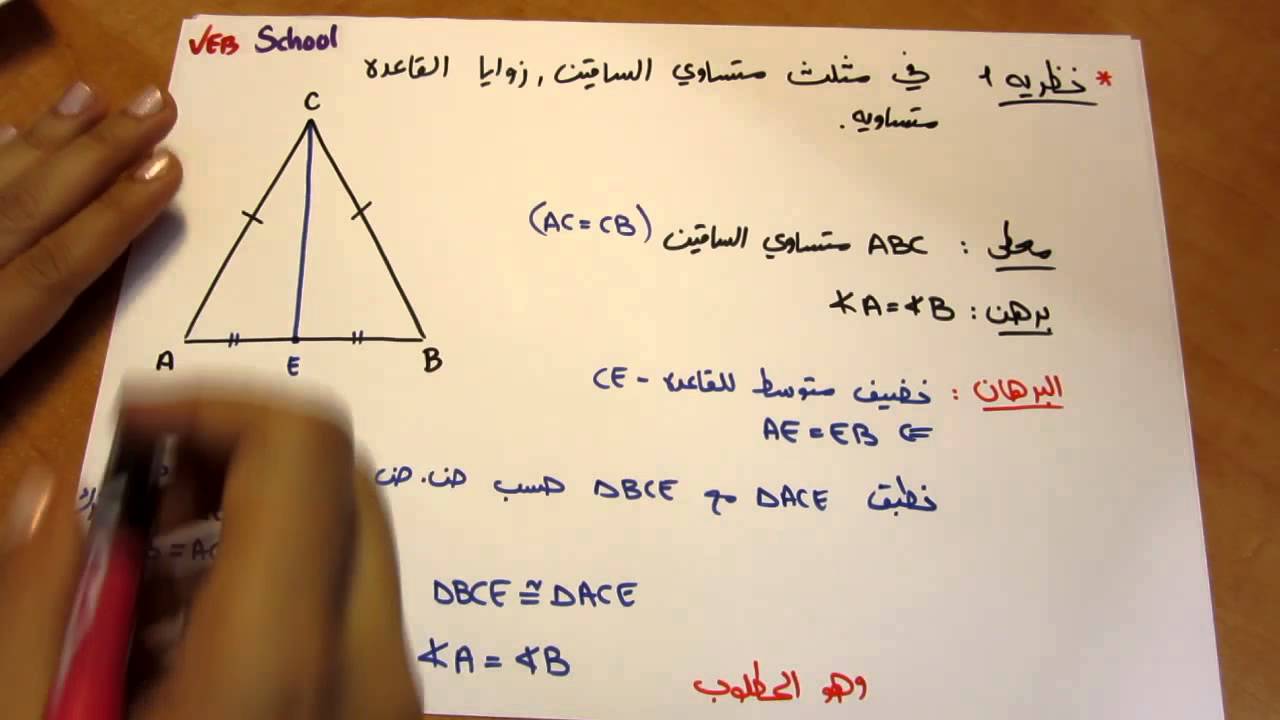
هندسة مثلث متساوي الساقين نظرية 1 Youtube
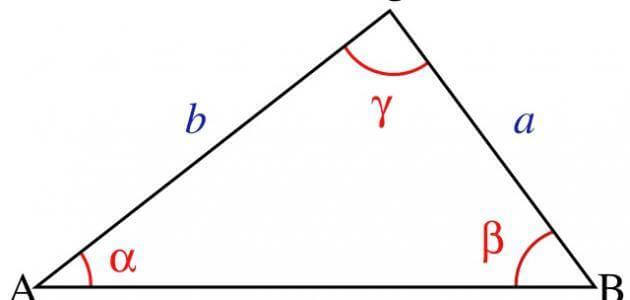
المثلث المتساوي الساقين تعريفه خاصياته وقواعده
خصائص المثلث متساوي الساقين موضوع
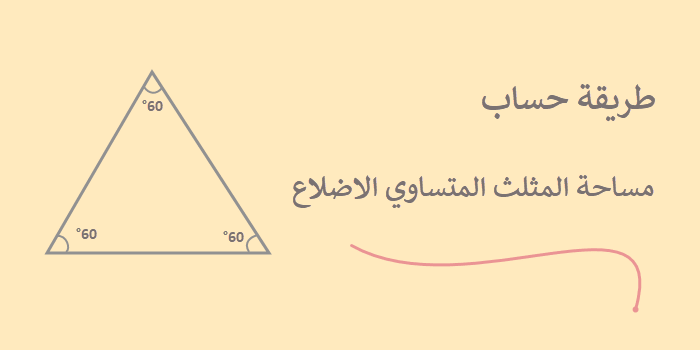
مساحة المثلث متساوي الأضلاع والقائم معلومة ثقافية
محيط المثلث متساوي الساقين وحساب قوانينه Eb Tools
زاويتا القاعدة في مثلث متساوي الساقين تكون متساويه Youtube
فيديو إيجاد محيط مثلث متساوي الأضلاع بمعلومية طول أحد أضلاعه نجوى
كيفية حساب مساحة المثلث متساوي الساقين صور توضيحية Wikihow
قانون محيط المثلث ومساحته موضوع
حساب مساحة المثلث متساوي الساقين Eb Tools
قانون مساحة المثلث بجميع انواعه
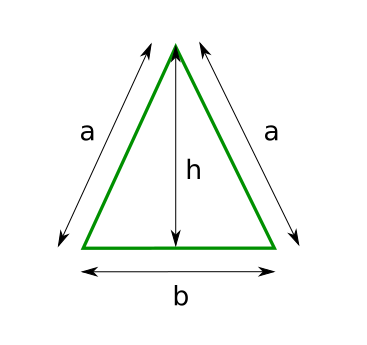
إيجاد ارتفاع ومساحة المثلث متساوي الساقين موسوعة حسوب
فيديو إيجاد مساحة مثلث متساوي الساقين بمعلومية قيمة الدالة المثلثية لزاوية قاعدته نجوى
مساحة المثلث متساوي الأضلاع طرق حسابه بالأمثلة Eb Tools
هندسة مثلث متساوي الساقين نظرية 3 Youtube
نصيحة 1 كيفية حساب مساحة مثلث متساوي الساقين الرياضيات 2020
المثلث Adelmina80
فيديو إيجاد طول قاعدة مثلث متساوي الساقين باستخدام خواصه نجوى
الرياضيات الهندسة الصف الثاني الإعدادي نفهم